Download 3d scanner software
https://meshroom-manual.readthedocs.io/en/latest/install/linux/linux.html
Den 06-05-2022
Her er min 3D Printer project. Her vil jeg beskrivelse hvordan jeg vil designe den. Der kommer sikkert flere ting til efterhånden som projektet skrider frem. Jeg vil bruge den som 3D printer. Men også som plotter. Så jeg kan lave elektronik print nemmere.
Af hardware jeg vil bruge disse produkter.
Du kan med fordel følge med her senere, da jeg vil opdatere siden efterhånden som projektet bliver færdigt.
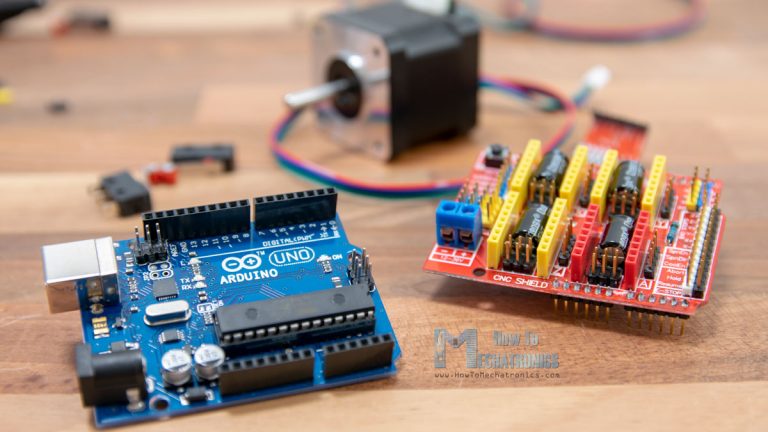
Arduino uno Board
Jeg har valgt at bruge et Arduino baseret kort.
Arduino uno Board
Jeg har valgt Arduino uno som er et billigt, og sammen med cnc shield er det meget nemt at sætte op.
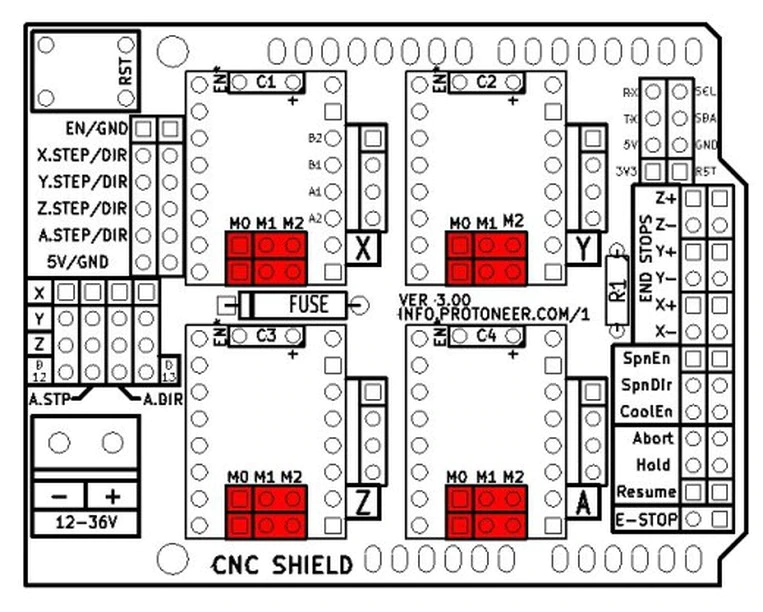
CNC shield board
CNC Board er et print som man sætter over på Arduino uno.
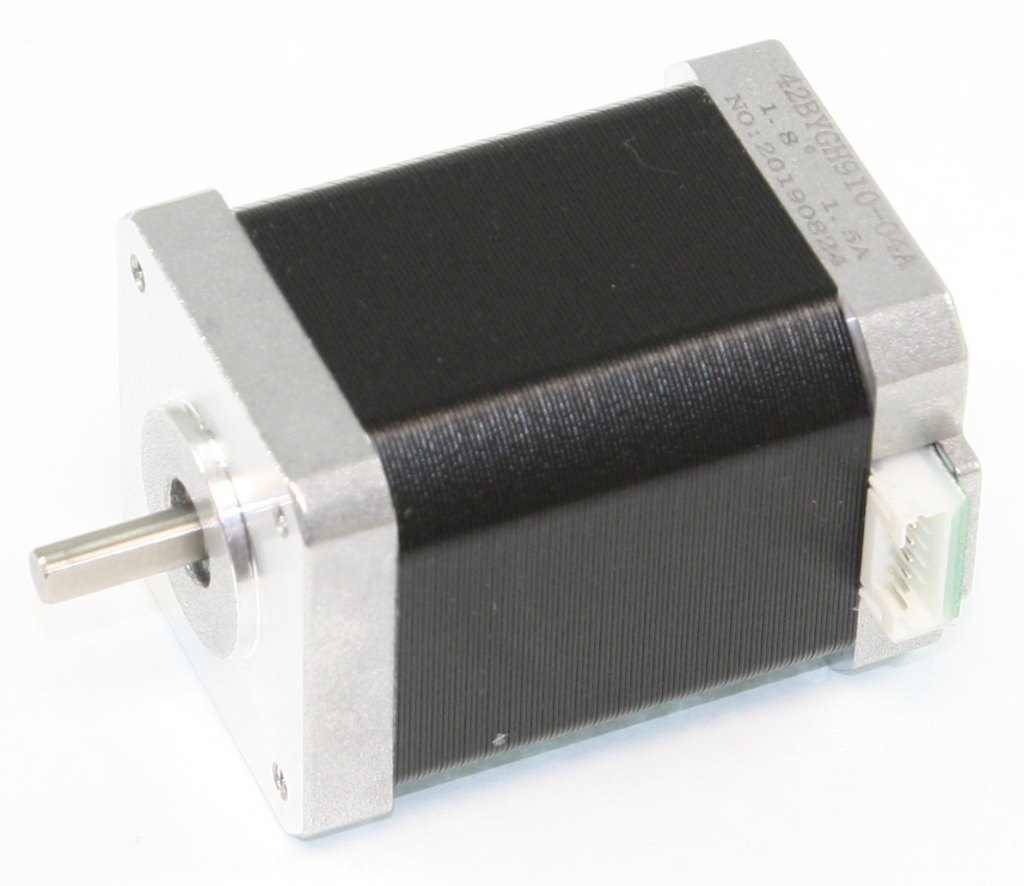
Stepper Motor NEMA17
Stepper Motor NEMA 17 er en motor med 1.8 grader i step. Som de fleste er. Der er mange som bruger den, så jeg prøver også med den.
POWER SUPPLY
POWER SUPPLY 30A 12 Volt.
Hot End
E3D V6 Hot End lavet af 3D Cam
EXTRUDER
Bowden Extruder
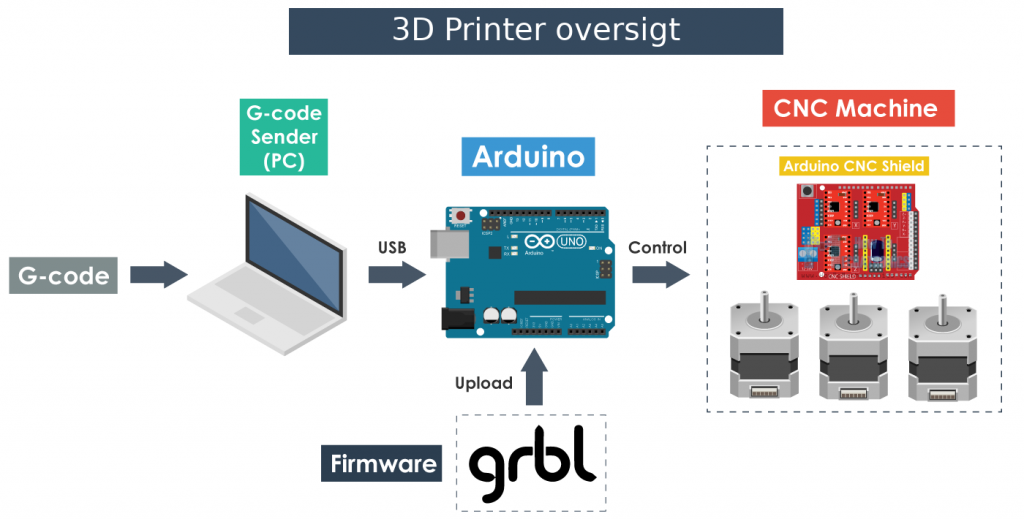
Hvis du som jeg selv vil lave din 3D Printer eller plotter vil du støde på GRBL. Så du vil lære lidt GRBL for at styre 3D Printeren.
Hvad er GRBL ?
GRBL er open source software eller bios om du vil til at styre stepper motorne. GRBL bruger G coder som input. Og output er motor bevægelse.
For du kan forstå hvad jeg mener, kan du se det på dette diagram.
For at teste første gang skal du bruge lidt software.
Hardware som du skal bruges.
- Aluminiumsprofiler 20×20 3 meter.
- Remhjul.
- Trapez gevindstang.
- Bronze Trapezmøtrik 12×3.
- Glidesko SCS8UU.
- Præcisions Aksel.
- Vinkel 20×20 i 90 grader + Møtrikker.
- Step motor 3 stk.
- Arduino uno.
- cnc-shield-v3-uno
- Motor controller 3 stk.
- En del skruer bolte og møtriker.
- Til rammen.
- Remhjul.
- Trapez gevindstang.
- Bronze Trapezmøtrik 12×3.
- Glidesko.
- Aksel.
- Vinkeler til ramme.
- Step motor 3 stk.
- Arduino uno.
- cnc-shield-v3-uno
- Motor controller til at styre stepper motor.
- Til montering af ramme og motor osv osv.
Pre start check list.
1. Plug shield kortet oven på arduino uno kortet. Og load GRBL softwaren på følgende måde.
- Download GRBL koden her.
- Unzip filen til en mappe som hedder “grbl-master”
- Start Arduino IDE. (Check du bruger den nyeste version)
- Load GRBL ind i IDE som et bibliotek. “Klik Sketch drop down menu. og vælg include library vælg derefter add ZIP library.”
- Vigtigt Vælg “Grbl biblioteket inden i grbl-master biblioteket.
- Åben derefter “GrblUpload” Arduino eksemplet.
- Nu er det tid til at kompile koden.
- Klik “Upload” og GRBL skulle gerne komple og flash din arduino uno nu.
2. Åben serial forbindelsen og check at GRBL køre.3. Husk stepper driver skal kalibreres. Test af hver stepper controller er vigtigt.
- Først connect stepper motor til controlleren. Det er vigtigt fordi Pololu driverne er designet til skrue op for strømmen til motoren er klar. Uden stepper motor tilsluttet er der ikke nogle til at bruge den strøm som bliver givet og du kan ødelægge controlleren. De bliver meget meget varme.
- Næste er at forbinde strøm til cnc shield som skal bruges til at styre motoren.
- Du kan nu sende G-Code kommandoer til Adrinoen og dine step motor skal gerne flytte sig. (GCode eksempler: “G1 X5? eller G1 X0? Eller G1 Y5?)
4. Efter du har udfør disse check kan du forbinde alle motorerne og power det hele op.
Indhent motor info.
Først skal du finde dine stepmotor specifikationer på hvor mange volt samt strøm din motor køre på. jeg køre selv med 12 volt 1.0 Amp. cnc controlleren kan køre med alt fra 12 til 36 volt
Model 42BYGH910-0A 1,8 grader 1,5 Amp
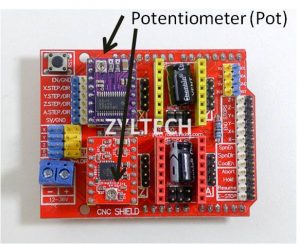
CNC shield klargøring.
Stepper driverene skal kalibreres før du kan bruge den på en 3d printer.
Husk at vende stepper driverne rigtigt. Og husk at potentiometrene på A4988og DRV8825 vender forskellige veje.
Det er også en rigtig god ide at checke at + og – strømkablet til cnc shield kortet vender rigtigt. Eller brænder du det af.
Der er flere muligheder inden for stepper controller. Jeg bruger A4988 pt.
Listen som jeg kender er.
| A4988 | 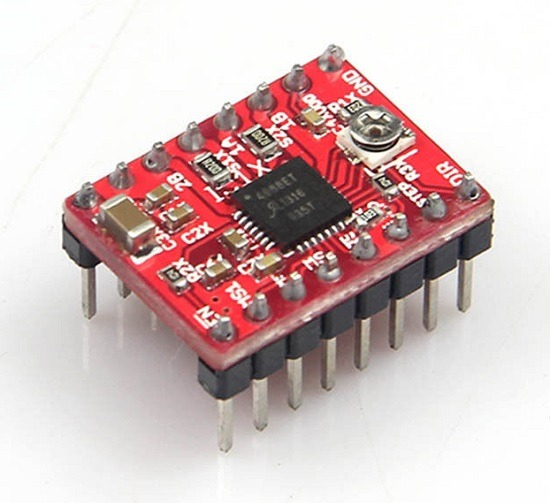 |
| RDV8825 |  |
TMC2100 | 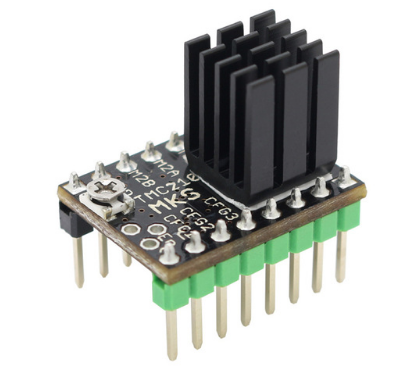 |
(Reference volt) justering for Stepper Driver.
A4988 har Rs=0.1 ohm. Så man strøm er Vref/0.4
For at måle Vref skal du bruge et multimeter og måle som vist her.
På RDV8825 bruger vi Vref x 2
på TMC2100 bruger vi Vref x 2
Reference spændingen kan justeres med en lille skruetrækker som du kan se på billedet. For en start er det en god ide ikke at gå over 1 Amp. Hvis motoren bliver meget varm skal du skrue lidt ned. Hvor imod hvis motor ikke flytter sig skal du skrue lidt op for Vref.

Jumper settings.
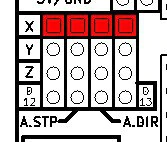
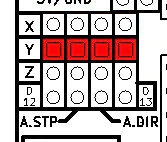
Konfigurering af Micro stepping for hver aksel.
*I tablen nedenfor kan du se hvornår der skal installeres jumper som skal indsættes. Hvis den er lo skal der ikke indsættes en jumper.
Pololu 4988 Stepper Driver konfiguration:
MS0 MS1 MS2 Micro
Low Low Low Full step
High Low Low Half step
Low High Low Quarter step
High High Low Eighth step
High High High Sixteenth step
Pololu 8825 Stepper Driver konfiguration:
MODE0 MODE1 MODE2 Micro
Low Low Low Full step
High Low Low Half step
Low High Low 1/4 step
High High Low 1/8 step
Low Low High 1/16 step
High Low High 1/32 step
Low High High 1/32 step
High High High 1/32 step
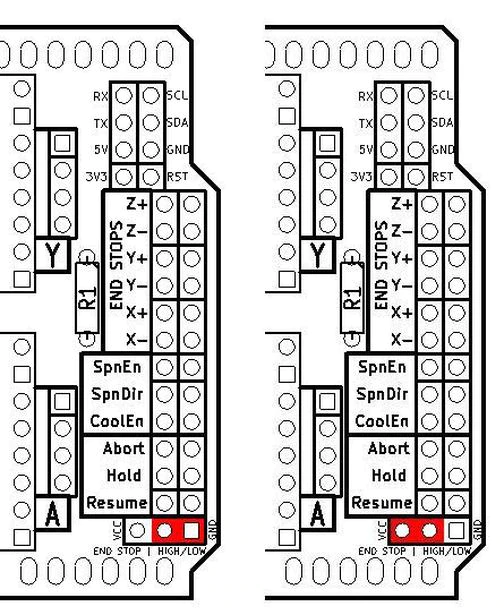
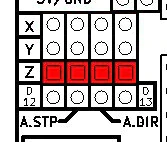
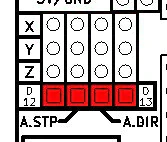
Default er GRBL konfigureret til at trigge en alarm hvis et ende stop går lo (bliver 0 volt). Du kan ændre det med den viste jumper på billedet oven for. Jumper findes kun på board som er version 3.02 og nyere.
GRBL-konfiguration
Nu er det tid til at få GRBL konfigureret til vores maskine.
Vi kan gøre det over seriel monitor på Arduino IDE programmet. Åben serial monitor i Arduino IDE og du se en prompt som vist. Dette betyder at der er forbindelse og alt er godt.
Hvis du ikke kan se det så check at hastigheden er sat til 115200 i serial monitor.
GRBL Prompt.
Grbl 1.1h [‘$’ for help]”
Hvis vi skriver $ bliver configuration settings vist.
$100=250.000 (x, step/mm)
$101=250.000 (y, step/mm)
$102=3200.000 (z, step/mm)
$110=500.000 (x max rate, mm/min)
$111=500.000 (y max rate, mm/min)
$112=500.000 (z max rate, mm/min)
$120=10.000 (x accel, mm/sec^2)
$121=10.000 (y accel, mm/sec^2)
$122=10.000 (z accel, mm/sec^2)
Alle disse settings kan ændres eller skal ændres så det passer med din printer. Vi kan sætte hvor mange step motoren skal udføre for få x aksen til at flytte sig 1 mm.
Jeg vil dog foreslå ikke at ændre settings her. Det er meget nemmere i GRBL controller programmet.
GRBL-control
Når du har fået det hele samlet findes der flere tools til at teste med. Universal Gcode Sender, G-Code sender, bCNC samt flere andre.
De er alle full featured gcode platform som virker i linux samt windows og på mac. og virker med GRBL samt TinyG
Jeg bruger Universal Gcode Sender. Det java så det virker i linux.
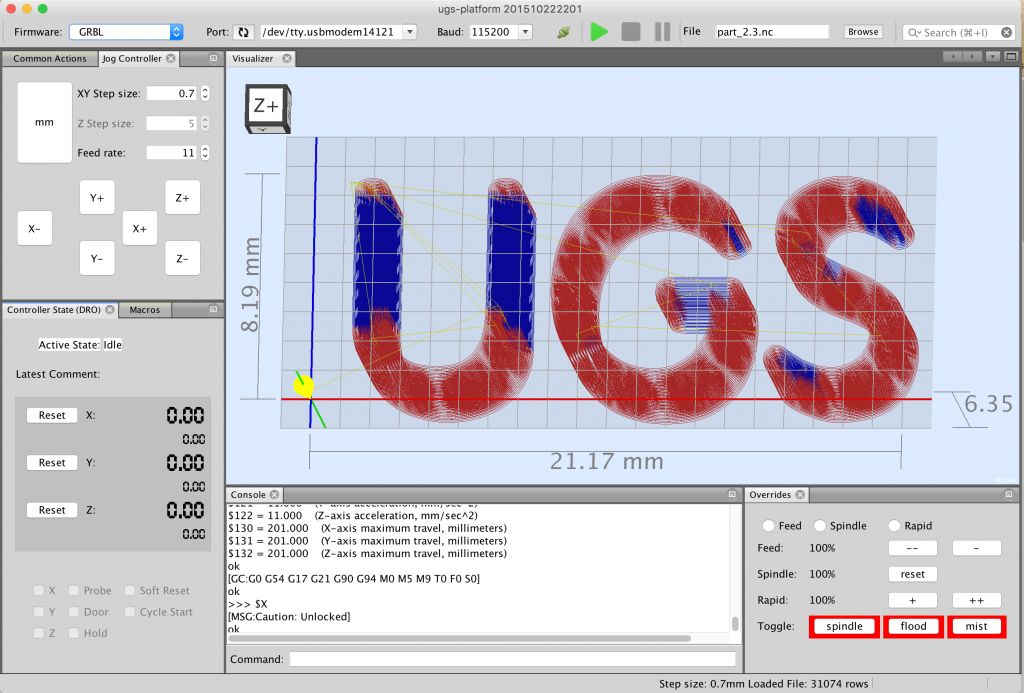
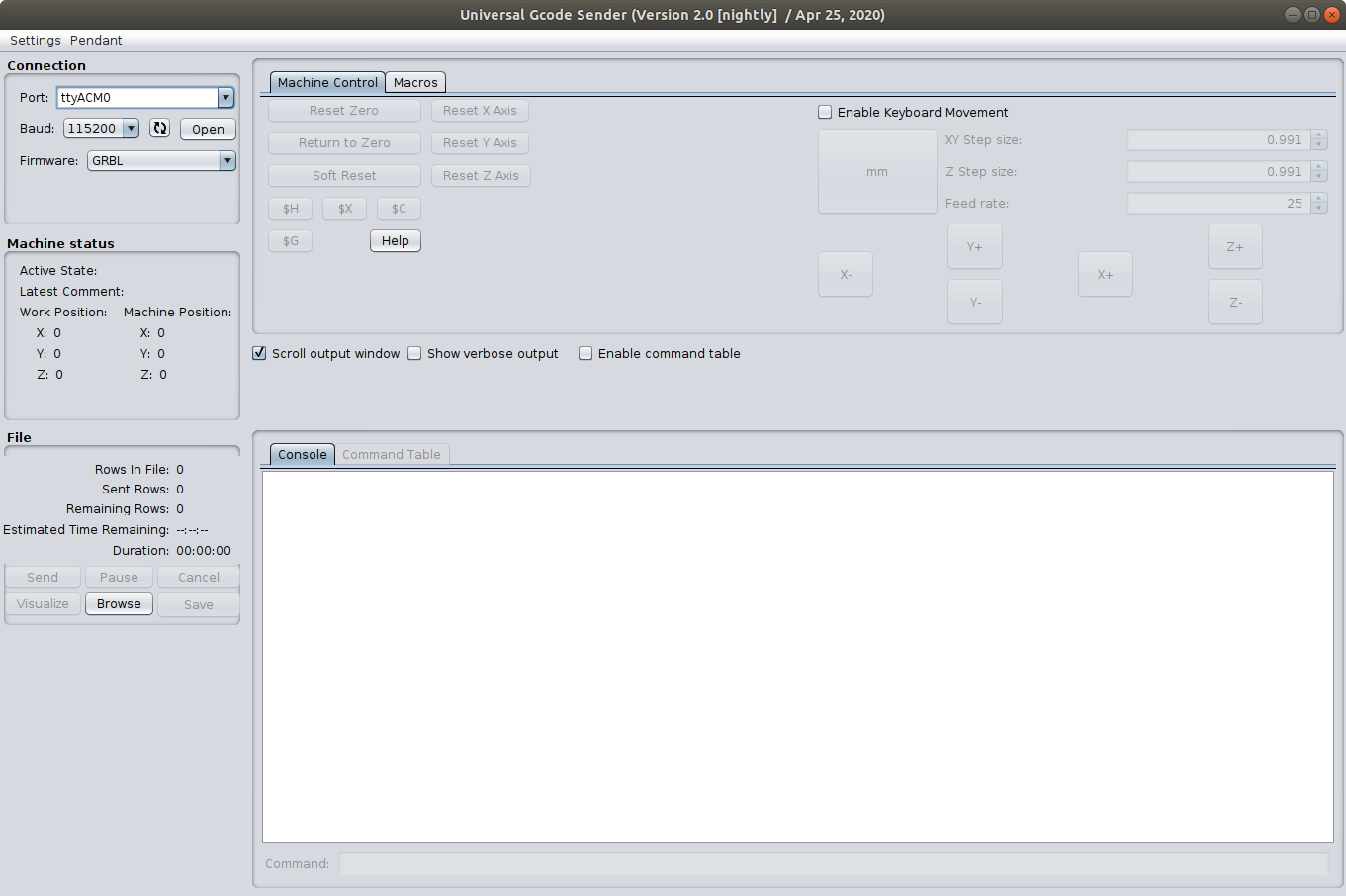
Hvordan bruger man G-Code sender.
Her vil jeg bruge version 2.0.
Hvordan bruger man bCNC
Bcnc virker også på linux mac og windows.
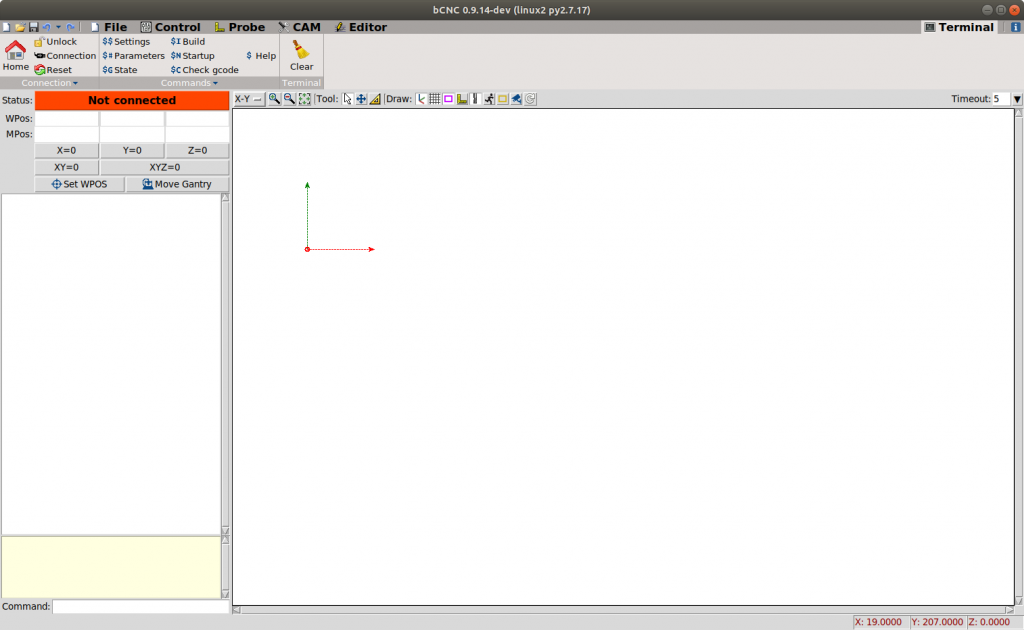
Du kan download den her
For at installere bCNC på linux på en nem måde kan du bruge pip.
pip2 install --upgrade bCNC
pip2 install --upgrade git+https://github.com/vlachoudis/bCNC
pip2 install . #in git directory
python2 -m pip install --upgrade bCNCFor at starte bCNC skriver du.
python2 -m bCNCSå er alt software og elektronik på plads. Og næste skrit er hvordan skal jeg lave rammen til printeren.
Her er det hele samlet.
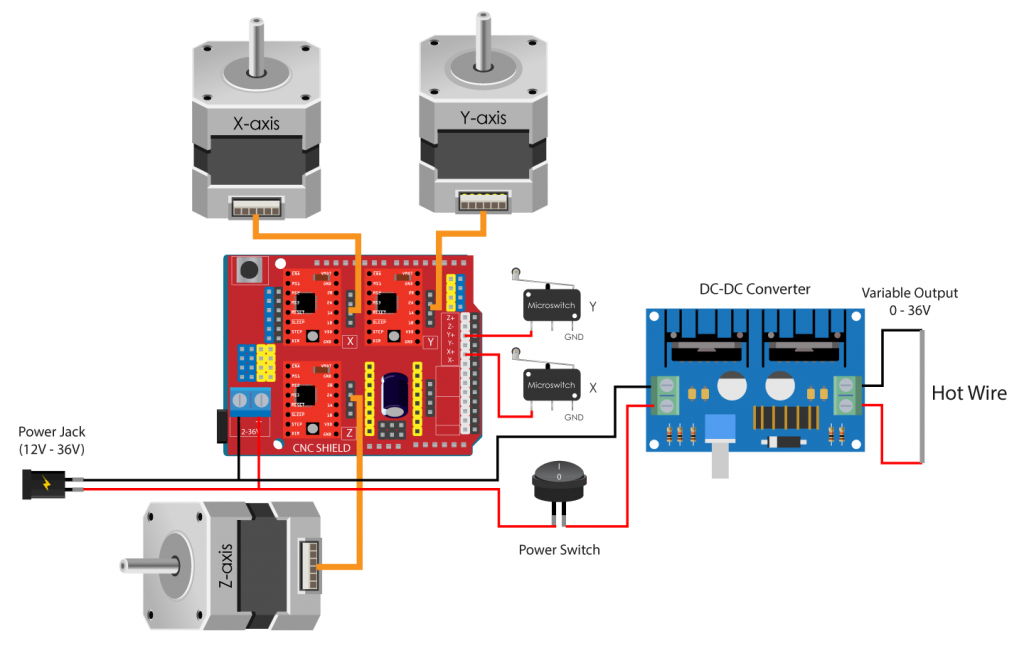
Tilslutning af motor.
Det eneste du skal gøre at konnect stikket på motor til stikket på cnc shield som vist.
Hvis motoren køre den forkerte vej skal du bare vende stikket på arduino cnc boardet.
5/5
Reference sites
TMC2100 guide – Stepper driver upgrades part 1 / How to set VREF & firmware https://www.youtube.com/watch?v=H41hIXdB6js
Mere om G-code info
Heated bed PID autotune.
Du skal bruge
M303 C5 E-1 S50
Det betyder E-1 er 1 bed
S50 er den temp du vil teste med.
Styring af filament længden.
For at sætte længden af filament skal du bruge 2 kommandoer.
Først
G302 S0 som betyder extrude med en temp på 0 grader. Så den ikke skal tænde heater op.
G1 E100 F100 det betyder extrude 100 mm
For at beregne vædien i configure.h filen skal du bruge længden på det filement som den afgiver og måle længden på den.
På min var vædien 200/210=0.9523 * 100 = 95.23 som skal rettes i config filen inden du kompiler og uploader programmet igen til printeren.
test fill rate 40 %
Video om settings her
Bed level Marlin 2.0 https://marlinfw.org/docs/gcode/G029-mbl.html
Mesh report G29 S0
Debug pins
M43 Giver en report.
M43 I Giver report over alle pins
M43 56 W Overvåger en pin 56
M43 E1 Overvåger endstop
Mere info https://marlinfw.org/docs/gcode/M043.html
![]()